

电 话:18853578090
座 机:0535-3020587
邮 箱:tsingkejia@163.com
地 址:烟台(山东)自贸区烟台经济技术开发区古现街道台北南路7号
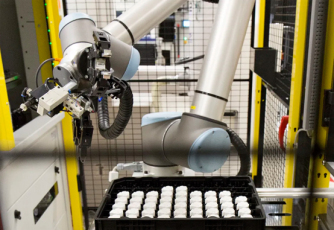
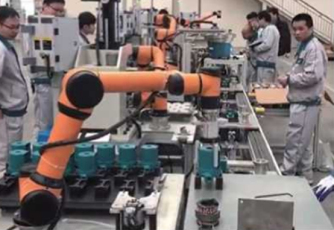
概念与设计目标:协作机器人是为了与人类共同工作而设计的,强调与人类之间的交互和协作。而传统工业机器人则更多地是为了执行重复性的、高精度的任务而设计的,更注重自主运行和效率。
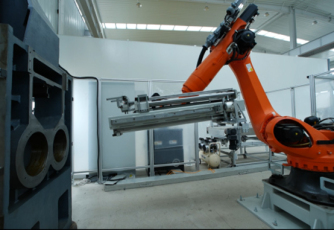
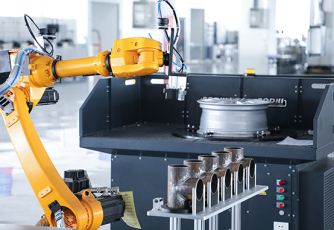
使用场景:协作机器人更多地出现在与人类共同工作的环境中,如医疗协助、仓储物流等领域。而传统工业机器人则主要应用于生产线上,完成重复性、繁重、高精度的工作任务,如汽车、铸造和家具制造行业等。
安全性与灵活性:协作机器人具备与人类共享工作空间的能力,并注重安全性,配备了高度敏感的传感器和先进的安全系统。而传统工业机器人的安全性通常依赖于外围设备或安全栅栏等。此外,协作机器人在设计上更注重灵活性,能够适应多种不同的工作任务和环境。
编程与操作:协作机器人通常采用简化的编程方式,使得普通员工也能够很容易地学习和操作。而传统工业机器人的编程需要更多的专业知识和技能,通常由专门的工程师或技术人员完成。此外,协作机器人的操作也更加依赖于人类与机器人之间的交互和协调。
性能与成本:传统工业机器人在性能上通常优于协作机器人,具有更高的精度、速度和负载能力。然而,协作机器人在成本上相对较低,主要体现在学习、操作、安装配置等方面的成本。此外,协作机器人在维护上的成本也相对较低。





















































 鲁公网安备 37069302000659号
鲁公网安备 37069302000659号